
一、学长简介
姓名:李鹏
专业:计算机科学与技术
职务:云淼项目组负责人、信息工程学院文体部部长

二、获奖情况:
1、2023至2024学年度校级三等奖学金
2、沈阳科技学院2024年度优秀学生干部
3、曾荣获RoboMaster 2025机甲大师高校联盟赛步兵对抗赛国家级二等奖、2024开源和信息消费大赛之“开放原子开源大赛”国家级优秀奖等省级及以上奖项30余项
4、获得软件著作权11项、实用新型专利2项(待提案)、公司合作证明3项、中国科学院科技查新1项、版权局作品登记4项等
5、以第一作者发表论文《基于改进非线性制导律的无人机航迹跟踪算法研究》[论文索引(李鹏 et al. 基于改进非线性制导律的无人机航迹跟踪算法研究[J]. 科技研究与创新, 2025, 3(6))]

三、项目实践(机器人开发实践项目)经历:
指导老师:闫锴、舒展
项目简介:
在机器人开发实践中,我深度参与履带式机器人与四足机器人的全流程搭建。这两类机器人应用场景不同,履带式机器人(如图1)适复杂地形探测,四足机器人(如图2)侧重灵活运动模拟,均为智能硬件实践典型载体。
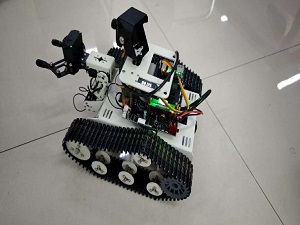

图1 履带式机器人 图2 四足机器人
四、项目工作内容:
1. 硬件集成与调试:在老师指导下,完成履带式机器人机械臂、摄像头等外设装配,确保传感器数据稳定传输;依据舒展老师建议,调试四足机器人关节舵机,优化机械结构刚性与运动灵活性,解决部件适配误差问题。
2. 程序开发与优化:协同编写控制代码,基于Python+ROS框架,实现履带式机器人路径规划(A*算法)、机械臂抓取逻辑;为四足机器人设计步态算法,通过PID控制优化运动稳定性,经多次测试迭代,让两种机器人均能精准响应指令。
3. 跨学科协同:配合团队完成电路布局、电源管理调试,保障机器人续航与硬件安全;在老师指导下,分析传感器数据(如摄像头图像、IMU惯性测量单元信息),优化环境感知算法,提升机器人自主决策能力。

图3学校创新创业项目报道
项目收获:
通过实践,掌握机器人机械结构设计、电子电路调试与算法编程协同逻辑,理解不同运动构型(履带、四足)的工程应用差异;闫锴老师的硬件思维与舒展老师的算法视角,拓宽技术认知边界,让我在智能硬件开发中,能更系统地实现“机械-电子-软件”一体化设计,为后续智能设备研发筑牢实践根基。
亲爱的学弟学妹们,沈阳科技学院是每一个有梦想的学子可以拼搏、展示自己的平台,在信息工程学院的大家庭,我们可以一起探索,向老师请教项目遇到的难题,与小组成员共同创意实践,有了这些点滴时光,汇聚成每个沈科学子的梦想平台,期待你的加入,欢迎你们不断挑战自己,我们一起书写崭新篇章,我在迎新现场等待你们的到来。




